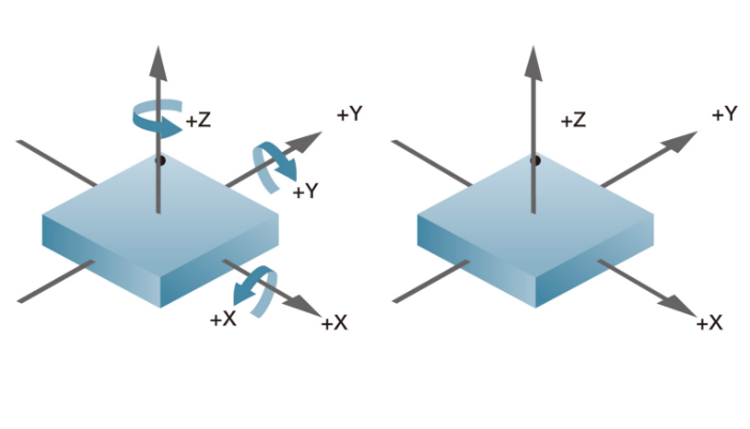
6軸力覚センサーをロボットアームに採用するメリット
ロボットアームへの採用が加速している6軸力覚センサーについて、メリットを紹介します。
ティーチングが容易になる
ティーチングとは、製造工程の中でどのように動くかをロボットにあらかじめ記録する作業です。6軸力覚センサーを使用すると、このティーチングを簡便に行えるようになります。
ティーチングにおいて複雑な動作を正確に設定するためにはロボットの挙動ひとつひとつを精緻に考えていく必要があり、大変な時間と労力を要する作業になります。特にアームが製品を把持する際の力の制御は、アームの稼働量だけで制御するのは困難です。
ですがロボットアームに6軸力覚センサーを組み込めば、その作業の労力を軽減することができます。力覚センサーはアームが製品を掴む把持力や滑りをデータとしてアウトプットします。そのデータに基づき把持力を調整するプログラムを導入することで、ティーチングにおける細かい動作の設定は簡略化することができるはずです。
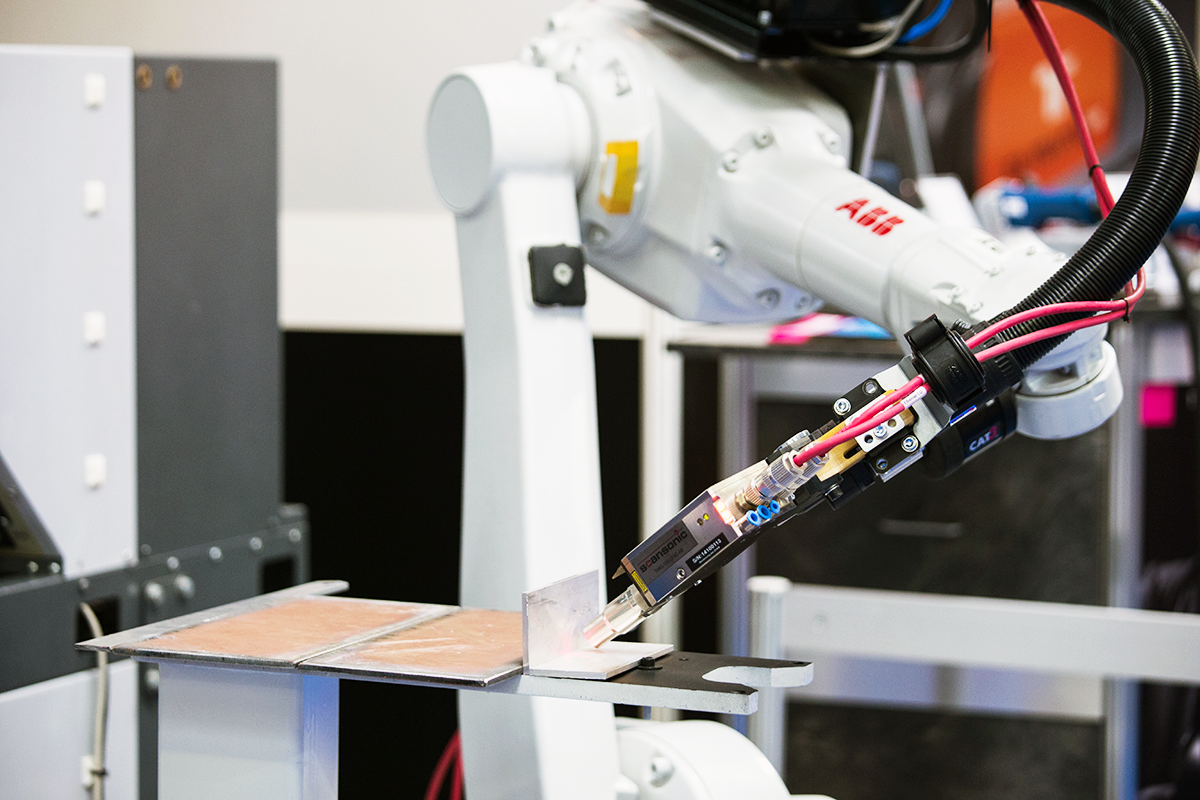
はめ合わせやネジ締め、平面合わせ、曲面ならい、バリ取りなど、3軸力覚センサーでは対応できない作業にも対応可能です。
ばらつきのあるワークに対応
ロボットアームで取り扱うワークは、常に同じ寸法かつ剛性の高いものばかりではありません。ティーチングによって一定の条件での動作を設定してしまうと、寸法にばらつきがあるものや形状が異なるものには柔軟には対応できないため、ロボットアームを活用できないといった課題がありました。
しかし、6軸力覚センサーを用いればワークをつかむ際の反力などを精密に測定することができます。この測定値を活用することで、ばらつきや異形状のワークにも臨機応変に対応が可能です。これによりつかむと潰れてしまうような食品などにもロボットアームが採用できるようになりました。
省人化と作業の均質化を実現
6軸力覚センサーを搭載したロボットアームは、より人間に近い作業を実現します。従来は作業者が必要だった製造工程をロボットアームに任せられるため、省人化につながります。
また、6軸力覚センサーは作業の均質化にも寄与します。複数の作業者が同じ作業をする工程では、作業者ごとの作業品質にばらつきが出る恐れがあります。こうした作業を6軸力覚センサー搭載のロボットアームに任せることで、ばらつきを極力排除し、品質を一定に保つことが可能です。