滑り覚とは、物体同士の位置変化が生じる際の速度や量を表します。滑り覚の研究は、ロボット開発の分野で重要な役割を果たしています。
ロボットハンドの研究は顕著に進んでいます。5本指を持ち繊細な力加減で物体を掴むなど、より人の手に近づけるようさまざまな開発が行われています。 この「人間の手を機能的に再現する」という点で重要なのが「滑り」を感じ取ることです。
我々人間は、手と物体の間に生じる滑りを感知することで、どれほどの力で掴めば良いかを調整することができます。したがって、ロボットハンドが人間の手を再現するためには、この滑りを人間同様に検出させ、力を制御させる仕組みを構築する必要があります。
この滑り覚の検出と制御に必要なのが「滑り覚センサー」です。
NISSHAでは滑り覚の測定に活用可能な、フィルムタイプの摩擦・せん断力センサーを提供しています。当記事では、滑り覚センサーの種類や用途の概要と併せて、NISSHAの摩擦・せん断力センサーの特長を紹介します。
Contents
滑り覚の測定方法にはさまざまなものが紹介されています。代表的な例としては、力覚センサーを使って物体の位置や負荷の変化を検出する方式、カメラを使って物体が動いた際の光学的な干渉縞を検出する方式です。その他にも圧力センサーなどで微振動や高周波を検出する方式などが挙げられます。
こうして検出された滑り覚は、ロボットが物体を安定的に保持するための制御に用いられるなど、活用機会はますます増えてきています。
NISSHAは、滑り覚の測定に活用できる摩擦・せん断力センサーを開発しています。
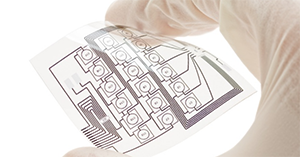
摩擦・せん断力センサーは、フィルム状のセンサー表面に生じる圧力と摩擦力の面内分布を測定することができるセンサーで、次のような特長を持っています。
・摩擦力と押圧力を同時に測定
センサー表面に接触した物体が横に滑る力(摩擦力)とセンサー表面を押す力(押圧力)を同時に検出します。摩擦力については力の方向も検出が可能です。つまり、摩擦力(x,y軸方向)と押圧力(z軸方向)の3軸の力を測定できる3軸力覚センサーになっています。
・フィルムタイプのセンサー
フィルムを基材とする薄くて柔軟なセンサーです。フィルム基材は湾曲させて使用することができるので、曲面部に搭載することが可能です。この特徴を利用すれば、ロボットの指部など、研究対象物の表面で発生する滑り現象を直接測定することが可能になります。
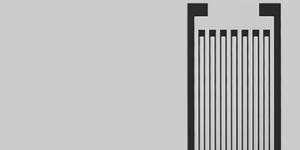
・多点同時測定(マルチアレイセンサー)
基材フィルム表面には3軸力覚センサーがマトリックス状に形成されているので、広い面積での摩擦力と押圧力のベクトル分布を分析することが可能です。
ロボットの指部における滑り覚の分布の分析などに活用できると考えています。
滑り覚の測定は、さまざまな分野での活用が検討されています。NISSHAでは、摩擦・せん断力センサーを使った滑り覚測定を、つぎのような分野で活用していきたいと考えています。
産業用ロボットハンドが把持する物体の位置変化を把握する手段として、滑り覚センサーの活用を検討しています。把持部の滑りを検知することで、作業の安全性を担保するなどの役割を果たします。
アバターロボットは、遠隔操作によって人の代わりに作業するロボットです。ロボットが体験している感覚を操作者に正確に伝えるために、アバターロボットにはさまざまなセンサーが必要とされます。滑り覚センサーは、「物を掴む」「歩行する地面の状況を把握する」「障害物の検出」など、いろいろな目的でアバターロボットの感覚器になり得ると考えています。
このようなロボット分野向けの滑り覚センサーには、フィルム状の摩擦・せん断力センサーが最適だと考えています。
ここまで、フィルム状の摩擦・せん断力センサーによる滑り覚の測定について紹介いたしました。ロボットハンドなどの滑り覚測定をご検討の際は、是非NISSHAにお問合せください。
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください