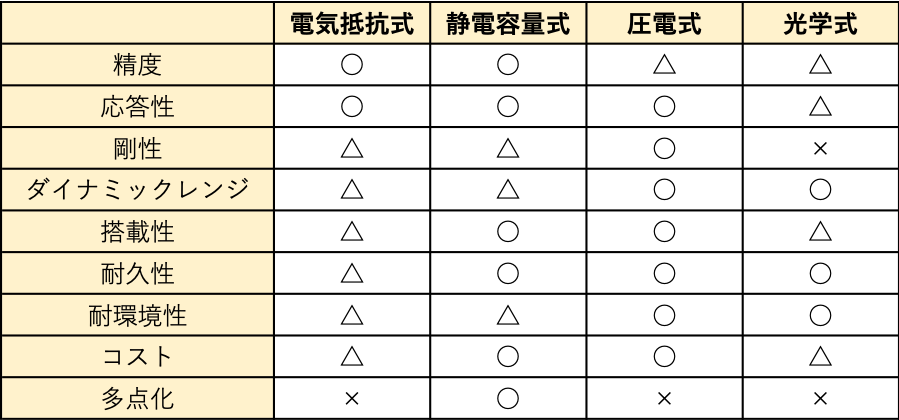
精度
力やトルクが長時間繰り返し負荷されても、絶対値として正しく計測されることが求められます。また温度や加速度などの周辺環境の変化に対しても、それらを補正する機構が求められます。
応答性
瞬間的な力やトルクの入力に対しても遅れが少なく、正しい値を瞬時に捉えられることが求められます。
剛性
計測する力やトルクはセンサーに全て加わることになります。このため、例えばロボットハンドの場合、力覚センサーの剛性が低いと掴んだものがしっかりと保持されないなどの不都合が生じます。特に微小な力に対してのセンサー感度を上げようとすると、剛性はトレードオフで低下することが多いため注意が必要です。一方で用途によっては問題にならない、むしろ柔らかいほうがいいこともあります。
ダイナミックレンジ
ダイナミックレンジとは捉えられる力やトルクの最小から最大の幅のことを指します。微小な力から強大な力まで精度良く捉えられることが望ましいですが、一般的にはトレードオフになるため、より重要度が高いレンジにフォーカスすることになります。
搭載性
力覚センサーは限られた空間に搭載することも多いためなるべく小型であることが求められます。またロボットの腕部など可動部に搭載されることもあることから、慣性を減らすために軽量であることも重要です。
耐久性
計測する力やトルクはセンサーに全て加わります。このため力覚センサーにもその力に対しての耐久性が求められます。
耐環境性
用途によっては厳しい温度や湿度、振動や電磁波に曝されるため、そういった環境に耐えられる必要があります。
コスト
製品全体の価格を下げるため、センサーの価格も低い方が望ましいです。
多点化
多くの力覚センサーはある一点に加わる力とトルクを計測できます。しかし用途によってはある計測領域での状態を多点的、面的に捉えたい場合があります。