食品工場では、少子高齢化の進行による人手不足対策や生産性向上、作業者の負担軽減を目的として、ロボットの導入に注目が集まっています。
一部の食品工場では、ロボットを導入したことにより人件費の削減や生産性の向上を実現しています。一方で、ロボットの活用範囲を広げていくためには、解決すべき課題が多く残っています。
本記事では、食品工場におけるロボットの活用例と導入における課題を理解していただき、この課題を解決できる可能性を持つ弊社の技術を紹介します。
Contents
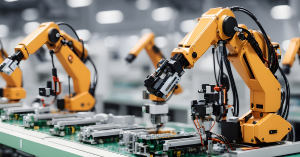
食品工場では、原料の前処理、加工、検査、包装、配送などさまざまな工程があります。特に包装・充填や保管・搬送の工程では、他の工程に比べて複雑な作業が少なく、力が必要な仕事が多いため、ロボットの導入率が高いです。
現在、食品工場向けに開発されたり、すでに導入されたりしているロボットを紹介します。
大量のパウチを箱詰めするために、カメラで撮影した画像を処理することでパウチの向きを認識し、パラレルリンクロボットで箱詰めするシステムが開発されています。 このシステムの導入により、箱詰めの人員を削減すると共に人為的なミスの低減に成功し、生産性を大きく向上しました。
ロボットハンドを3Dプリンタで製造し、システム構成をシンプルにすることで、導入やメンテナンスに必要な費用を削減した自動定量ピッキングシステムが開発されています。 キャベツの千切りなど細かい食材を扱う場合、素早く一定量だけを把持(はじ)するのは、熟練の職人でないとできませんでした。定量ピッキングシステムでは、このような難しい作業であっても代替可能です。
パレタイジングとは、商品を輸送する際にパレットに段ボールを積む作業です。異なるサイズの段ボール箱を扱う場合、作業者がどのように積み上げるか検討する必要がありました。 パレタイジングロボットは、異なるサイズの段ボールに対応し、全自動で箱の選別からパレタイジングまでをこなします。このロボットの導入により、作業効率化や人員の削減に加えて、重いものを扱う際の事故防止など安全性の向上にも寄与しています。
ここで紹介したようなロボットは、食品業界の中でも比較的多く導入が進んでいます。
ロボットは食品工場で活用されるようになっていますが、工程や扱う商品によっては導入がスムーズに進んでいません。
食品をロボットで把持する場合、扱う食品に合わせたエンドエフェクタ(ロボットアームの先端)を使用する必要があります。少量多品種の場合には、それぞれの品種に合わせてエンドエフェクタを頻繁に交換する必要があり、そのたびにサニテーション(洗浄や殺菌)が必要です。
部品交換やサニテーションを行っている間は生産を止めるため、ロボットを導入することで、生産効率が悪化してしまう可能性があります。
野菜や魚介類、また加工品であっても一つ一つ形状が異なる場合、上手く把持できない場合があります。食品を把持できなかった場合には、チョコ停(生産設備のトラブルによる一時的な設備の停止)が発生するため、そのたびに作業者が調整を行わなければいけません。
効率化や人件費削減を目的にロボットを導入したのに、ロボットを調整するためにラインを頻繁に止めてしまうと、人件費が余分にかかります。多少形状が異なる食品であっても、調整やエンドエフェクタの交換が不要なロボットが必要です。
食品工場には、人間が難なくこなせる作業でも、ロボットが同じ作業をしようとすると時間がかかってしまう場合があります。このような作業では、ロボットを導入したとしても、導入にかかるコストを回収するのに時間がかかってしまいます。
複雑な作業でも、ロボットが得意な作業に組み替えることはできるかもしれません。しかし、決められている作業を分解しロボットがこなしやすいように組み換えることは、ロボットに関する専門的な知識が必要なため簡単ではありません。
また、ロボットの作業を速くする手段の一つとして、ロボットの多ハンド化にも注目が集まっています。1台のロボットに複数のロボットハンドがあれば、作業時間の短縮が可能です。しかし、ロボットハンドを増やした分のセンサーなどが必要となり、コストが増加してしまいます。
食品工場でロボットの活用を進めていくための課題を紹介しました。これらの課題を解決するのが困難なため、食品工場では、ロボットの導入が特定の作業や工程に限定されています。
ここまで、食品工場へのロボット導入事例や導入時の課題について確認してきました。食品工場で導入されているロボットの種類は限られており、紹介したような課題を解決するためには、今までとは異なる技術が必要です。
ロボットの導入を検討する場合、まずは人の動きをまねさせることを考えます。肩やひじなどの関節の動きは、ロボットを駆動させるサーボモーターにかかる負荷を検出することで実現できます。
しかし、関節の動きを模擬するだけでは、少量多品種への対応や形状が異なる食品を扱うことはできません。人の手と同じように、扱う食品によって動作を繊細に制御できる必要があります。
人は、指の表面にかかる摩擦や押し返される力を感じながら力を調節しています。 ロボットの動きを人の動きに近づけるためには、指先にかかる摩擦力や押し付ける力をセンサーによって検出し、その情報を元に動きを制御することが重要です。
NISSHAは、一つのセンサーで複数の場所における摩擦・せん断力をリアルタイムに測定できる、面状のセンサーシートを製品化しています。厚さ1mm以下と薄く、柔軟なフィルムを使用しているため、平らではないロボットハンドの指に貼り付けても作業の邪魔にはなりません。
センサーの表面にかかる摩擦力の向きと力を定量的に測定できるため、食品を握るだけでなく”ねじる”、”押し込む”、”引っ張る”などの動作を検出できます。また、ロボットの指先や手のひらなどの湾曲部にも貼り付けられます。
NISSHAの摩擦・せん断力センサーを用いることで、食品工場のロボットは指先の感覚を得ることができ、その情報を活用することで、人間の動きに近づけられます。ロボットの指先に貼り付けたセンサーで、ラインに流れている製品の種類を判別したり、形状の異なる製品を適切な力で把持したりすることも可能です。
摩擦・せん断力センサーは、印刷技術を活用して製造され、大きさもカスタマイズできるため、ロボットハンドによく用いられる力覚センサーに比べ低価格で製造できます。ロボットの多ハンド化などで、複数のセンサーが必要となる場合には、全体の費用を抑えながら必要な機能を実現可能です。
NISSHAでは、摩擦・せん断力センサーの評価用キットレンタルサービスを用意しています。この評価用キットを使用することで、作業者が食品を把持する際にどの部分にどの程度の力がかかっているか調べたり、ロボットハンドの触覚センサー開発に取り組めます。
さまざまな工場でロボットが導入され、人の代わりに生産や搬送の仕事を担っています。食品工場でも食品の包装や搬送の工程では、すでに多くのロボットが導入されています。
一方で、多品種少量生産であったり、同じ製品でも形状が異なる食品を扱う工程では、人と同じような動作をロボットにさせることができず、導入が進んでいません。
NISSHAの摩擦・せん断力センサーを用いることで、ロボットに指先の感覚を与えることができ、従来は難しかった食品もうまく把持できるようになります。摩擦・せん断力センサーの評価用キットレンタルサービスを用意していますので、ぜひ一度お問い合わせください。
こんな記事も用意しています。
このシートがロボットの手に触覚を与える
摩擦・せん断力をリアルタイムに測定
接触界面では何が起こっているのか
摩擦・せん断力センサー評価用キット
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください