指先を使って作業をするとき、人間はさまざまな感覚を使いながら動きをコントロールしています。同じような作業をロボットのハンドに行わせる場合も、人間と同じようにさまざまな感覚が必要になります。それを担っているのが力覚、触覚センサーとよばれる電子部品です。今回はそれらの特徴や方式について解説します。
従来、工場などで活躍しているロボットはあらかじめ決められた動作の繰り返しや限られた種類の製品をつかんだり、加工したりする用途に特化していました。これはロボットに「長時間作業を行っても疲れたりせず決められた動作を確実に行うことができる」という特徴があり、大量生産を行う工場などでの業務効率化や品質維持に役立ったためです。
このためロボットが向き合う環境も一度決められた後には変わらないということが一般的でした。この場合、物をつかんでいる状態や負荷の状態を検知するためのセンサーは必要ないこともありました。しかし多品種少量の製品を扱う作業などでは、その状態をリアルタイムに知ることが必要になり人間の手にも似た汎用性が求められます。これには物をつかんだり、加工したりするときの状態を緻密に検知するセンサーが欠かせないのです。
ロボットに使われるセンサーには大きく分けて4つの種類があります。それぞれの特徴や使われ方について見ていきましょう。
ロボットハンドの多くは関節部に複数の軸を持っています。この各軸にかかるトルクを検出しそれらを総合的に評価することで、つかんでいる状態の推測を行うことができます。一般的には軸を構成する構造部にひずみゲージを貼り付け、そのねじれを検出しています。
ひずみゲージとはごく微小な変形(ひずみ)を電気的な抵抗値の変化として検出することができるセンサーです。ひずみの量に比例して抵抗値も変化するため、ひずみゲージに加えた電圧の変化からひずみ量を推測できます。ひずみ量自体も、構造部にかかったトルクにおおよそ比例するため、作用しているトルクを推測することができます。
トルクの計測はロボットハンドのアーム軸などで行われることが多く、実際に物をつかんでいるハンドから距離があることがあります。この場合つかんでいる状態の推測は間接的になることになり、細かくダイレクトに検知することは比較的難しくなります。
ロボットハンドの多くは関節部を駆動していますが、これらはモーターを動力源としていることが大半です。
この場合、動作中のモーターに作用している負荷と電流値は比例するため、この電流値を計測することでトルクを推定することもできます。トルク計測用のセンサーが不要で、一定の条件下で動作している際には正確なトルク推定が可能です。しかし始動、停止時には電流が非定常になる、駆動部の慣性によって実際にかかっている負荷よりもオーバーシュートした値が検出される、摩擦や熱を原因とする損失によって純粋な負荷とのずれが生じるなどの欠点もあります。
このため、ロボットハンドなど繊細なトルク制御が求められるアプリケーションに対して全面的に使用することは難しいといえます。
ロボットハンドの手首部に取り付けてハンドがつかんでいる状態を検知する力覚センサーもあり、これはリストフォースセンサーや手首力センサーなどとよばれます。
ハンドにより近い箇所での力覚を検知することができるため、前述のトルクセンサーなどの組み合わせと比較し、よりダイレクトに負荷や作業状態の推測を行うことができます。
一般的なものはセンサー内部の計測点を基点としてX軸、Y軸、Z軸方向の並進力と、その軸まわりのトルクを検出できる6軸力覚センサーです。センサー内部に複数のひずみゲージを備えた構造で、その検出値を元に力とトルクに変換を行っています。6軸力覚センサーは近年では比較的小型なタイプも開発され、多指ロボットの各指に備える場合もあります。
力覚センサーによる方法はトルクセンサーなどと比較すると、物をつかんでいる状態をよりダイレクトに検知することができます。しかしそれでも指先からは離れた箇所での計測となり、間接的な検知になることは避けられません。またこのセンサーは基点となる一点での情報しか得ることができません。
このためつかんでいる物の細かな形状や質感などを検出することはできません。人間が持っている皮膚や指先での触覚などと比べると検知能力は限られ、多品種少量の作業や扱う物が予測できないような状況では対応できないことがあります。
トルクセンサーやリストフォースセンサーよりも更にダイレクトに感覚を得るため、ハンドの指先表面に取り付けることのできる触覚センサーも作られています。
指先での状態をダイレクトかつ多点的に検知することができるため、つかむ動作や作業状態の検知が格段にしやすくなります。指先という限られた領域に取り付ける必要があるため、小型で曲面形状などにも柔軟にフィットすることが求められます。
このためフィルム状の躯体にマトリックス状に検知点が分布配置された形式のセンサーが一般的です。
初期の触覚センサーは単純に各点での接触の有無のみを検知するスイッチのようなものでした。その後、センサー表面垂直方向についてのちからの大きさ(圧力分布)を検知できる、圧力センサーシートが使われるようになりました。これにより指先のどの位置にどの程度の力が作用しているかを細かく検知することができるようになり、多品種少量に対する作業や雑然と置かれた物をつかむなどの作業もできるようになりました。
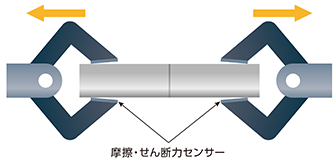
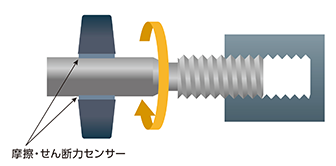
NISSHAの触覚センサーはこれを更に進化させたものといえます。従来のセンサー表面に垂直に作用する力の大きさに加え、それに直行する2軸を加えた、3軸方向の力を検出することができます。
これによりハンドのつかむ力に加え、引っ張る、ねじるといった力のコントロールもダイレクトに検知することができるようになります。他にも表面の質感を確認したり、ほどよい力加減で撫でたりといった従来のハンドでは難しかった動作を行うことができます。形状もフィルム状で非常に薄く、またフレキシブル性にも優れているため曲面への追従も可能で小さなハンドの指先への適用もできます。
このような特徴から、NISSHAの触覚センサーはこれからのロボットハンドの可能性を大きく高めることができるのです。
こんな記事も用意しています。
フィルム型圧力センサーの利点と用途を知る
ロボットに新たな感覚を付与する、NISSHAの触覚センサー
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください