NISSHAの摩擦・せん断力センサー技術
物体と物体が接触して動く際、その接触面には摩擦力が生じます。ネジ、ベアリング、衣服、靴、オイル……。どんな製品、どんな部品も摩擦力を考慮せず開発することはできないのではないでしょうか。摩擦力を測定する技術は、どのような産業においても重要な技術だと考えます。 NISSHAは摩擦力測定に役立つフィルムタイプの摩擦力センサーを開発しました。この記事では摩擦力や一般的な摩擦測定技術についておさらいし、NISSHAのセンサーがどのように役立つかを紹介します。
Contents
摩擦力は物と物とが接触する界面に発生する力です。 例えば、台の上に置いてある物体を手で押して動かそうとしているところを想像してください。手で押す力が小さいときには物体は動きません。押す力が一定の強さを超えたとき、物体は動き出します。これは、手で動かそうとする方向とは逆の方向の力が物体と台の接触界面に発生し、押す力に抵抗していることに起因しています。この物体と物体の接触する界面に発生する抵抗力が摩擦力(摩擦抵抗)です。
摩擦力F’は、重量Wにより接地面から垂直方向に作用する垂直抗力をNとすると、摩擦係数をμとして
F’=μN
の式で表せます。
摩擦力には、静止状態の物体にかかる静止摩擦力と、台上を動く物体にかかる動摩擦力の2種類があります。
静止摩擦力は物体を押す力と釣り合っています。この状態では物体は動きません。しかし押す力がある一定の強さを超えると物体が動き出します。物体が動き始める瞬間の摩擦力を最大静止摩擦力と呼びます。
動き始めた物体には押す力に関わらず一定の摩擦力(抵抗力)が働きます。これが動摩擦力です。動摩擦力は、最大静止摩擦力より小さくなります。
摩擦力は力覚センサーを使って測定されます。測定装置は実験レベルで使用する摩擦計から、実製品に組み込むセンサーまでさまざまです。ここでは、現在使われている一般的な摩擦の測定方法を紹介します。
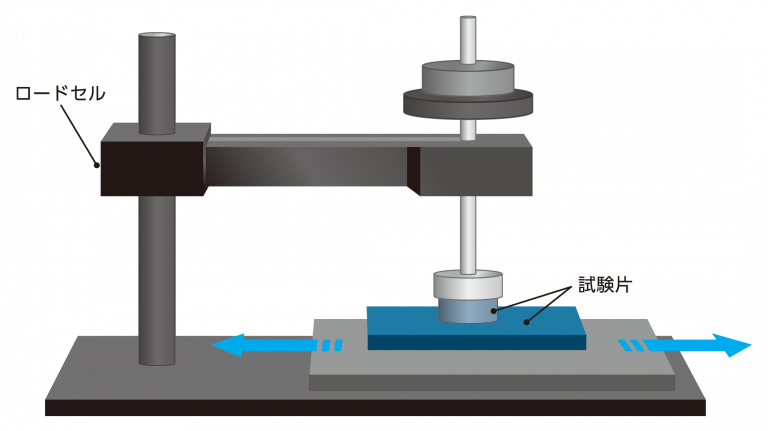
研究開発の場面では、摩擦計と呼ばれる装置が使用されています。摩擦計では小さな個片の状態にした試験片が使用されます。テーブルと接触子に試験片を貼り付け、接触子側の試験片に荷重をかけます。テーブルを左右にスライドさせることでふたつの試験片をこすり合わせ、接触子のアームに取り付けられたロードセルで検出した応力から摩擦力を算出します。
摩擦計は小さな試験片を使って測定する装置なので、研究開発の場面でおもに使用されます。立体的な実製品、大きな製品の摩擦測定では、その他のロードセルや圧力センサーシートなどのさまざまな測定装置が使用されています。
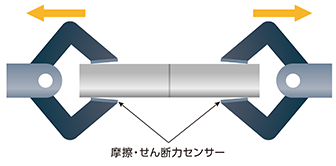
ロードセルは、軸方向の力の変化を電気信号に変換する変換器です。
力に比例して変形する起歪体を持ち、起歪体の変形量を、ひずみゲージなどで測定することで、力の変化を電気信号として出力します。押す、引くといった1軸の動きの検出だけに対応したロードセルから、横方向への滑りを検出する3軸力覚センサーや、回転動作も検出できる6軸力覚センサーなどが紹介されています。構造が単純で操作がしやすく、引張り、圧縮方向の力の変化の測定など広く用いられています。 このようなロードセルや力覚センサーを試験対象物の表面に取り付けることで、他の物体と接触するときに対象物にかかる力の挙動を検出し、摩擦力の分析評価に利用することができます。
圧力センサーシートは、一枚のシート上で多点の圧力を同時に検出できるようにセンサーを構成した測定装置です。シート上にかかる圧力の分布をリアルタイムに測定できます。
シート状なので軽く、変形した面にも設置できます。床面に設置して物の移動を検知することができる大型のセンサーシートも紹介されており、摩擦計とは違い、フィールドワークで使用できる測定装置です。 ただし、圧力センサーシートはシート面に垂直にかかる圧力だけを検出する装置です。そのため摩擦力そのものを測定することはできませんが、センサー面内の荷重分布の変化を分析することで、接触界面にかかる力の大きさや挙動を明らかにすることができます。
NISSHAでは、圧力だけでなく、横方向の摩擦力の面内分布も測定することができるセンサーシートを開発しました。3軸の力の分布をマッピングすることができるセンサーシートです。このセンサーシートについてはのちほど詳しく紹介します。
摩擦力を知ることは、さまざまな分野で重要な役割を果たします。ここでは、摩擦力測定を産業分野で利用する取り組みの事例を紹介します。
産業用ロボットの分野では、ロボットハンドまたはグリッパーで物を把持する際には、ロボットの手や指にかかる圧力を測定して物を壊さないように最適な力で把持する必要があります。さらに、把持したものを持ち上げる、引っ張る、押すといった動作を加えた場合、ロボットの指と把持物の間には横にずれる摩擦力が発生します。この摩擦力を検出できれば、ロボットのさまざまな動作を正確に制御することができると考えられています。
棒状の物を把持して引き抜く場合は、引き抜く方向とは逆に生じる摩擦力を検知し、静止摩擦力から動摩擦力への変化を捉えることができれば、把持する力を必要以上に強くして部品を破損するといったリスクを軽減することができるはずです。また、ネジで結合された棒をロボットハンドで把持して回すような場合にも、摩擦力を検知しながら回せば、大きな力で棒を回して破損させるようなことは起こりません。
※NISSHAセンサーシートのロボットへの応用提案はこちら
エンジン、タイヤ、シートなど、自動車の性能評価で摩擦力の分析は欠かせません。 エンジンやサスペンションなど、回転部分や断続的に衝撃を受ける接合部を持つモジュールでは、部品間に発生する摩擦力は品質を左右する大きな要素と言えます。材料となる鋼材の選定の場面はもちろん、実車におけるリアルタイムな摩擦力の変化測定が可能になれば、より安全で効率的な運航を実現する自動車の開発につながります。
また、タイヤの開発では圧力センサーシートなどによる圧力分布測定が活用されています。センサーを敷き詰めた路面上で自動車を走行させ、タイヤのトレッドパターンが接地面に及ぼす圧力の分布をリアルタイムで計測することでグリップ力などの分析を行います。タイヤはゴムと接地面との間の摩擦力で車を動かしているので、圧力分布だけでなくトレッドパターン内部での細かな摩擦力の分布を測定することができれば、タイヤの構造や素材の研究に貢献できるはずです。
その他にもドライバーに快適な運転体験を提供するため、座席に生じる圧力、摩擦力の分布を測定し、長時間の運転でも疲れない快適な座席を設計することに摩擦測定の技術が利用できます。
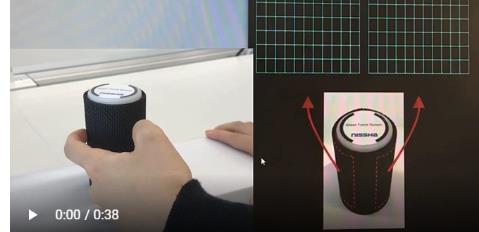
摩擦力の検出技術は、アミューズメント分野や医療分野、社会インフラを支える様々な機器の操作用インターフェースとしても活用が期待されます。たとえば、従来は押したことだけを検知していたタッチパッドに摩擦力センサーを追加することで、指で押す力の大きさや動きも検知できるようになります。これにより、従来のコントローラではジェスチャー機能などで制御していた「ねじる」「回す」「ずらす」などの動作を、指先1点で入力することが可能となり、より自由度の高いインターフェースを実現することができると考えられます。
ここまで、摩擦力の測定装置や、摩擦力測定が産業でどのように利用されているかを見てきました。NISSHAでは、このような摩擦力の測定を実現するデバイスとして、「摩擦・せん断力センサー」を開発しています。
NISSHAの摩擦・せん断力センサーは、フィルム基材を使用し、薄さとフレキシブル性を備えた面状センサーです。フィルム上にマトリックスとして形成されたセンサーは多点同時での検出を可能とし、圧力だけでなく、摩擦力の面内分布を測定することができます。 例えば、1mm以下の薄さとフレキシブル性により、ロボットハンドの指先や手のひらに貼り付けて摩擦力を測定することができます。これにより、ロボットハンドが物体を把持する力を最適化したり、接合された部品を押し引きするロボットの指にかかる摩擦力の大きさから接合強度を測定するなどの利用方法が考えられます。また、研磨面の摩擦力を測定することで、研磨面の滑らかさを数値化することが可能となります。
タイヤやシューズなどの接地面における摩擦力の変化の解析にも利用可能です。点ではなく面上での圧力分布をリアルタイムに測定することにより、靴底のラバーがつぶれる動きなどの今まで見ることができなかったさまざまな部品、材料の挙動を把握することとに活用できます。他にも、医療分野において、ベッドや車いすと患者の皮膚に生じる摩擦力をリアルタイムで測定することで、患者への負担がどのようにかかっているのかを把握できます。
※ 本製品は医療機器ではありません
薄さとフレキシブル性を備え、摩擦力・せん断力のリアルタイムマッピングが可能なNISSHAの摩擦・せん断力センサーは、様々な分野で利用可能です。より安全で快適な製品を実現するための研究・開発・モノづくりに、NISSHAの摩擦・せん断力センサーをご活用ください。
こんな記事も用意しています。
NISSHAのOEM・受託開発
ロボットに新たな感覚を付与する、NISSHAの触覚センサー
タッチパネルは接触から非接触へ-タッチレス操作の非接触タッチパネルとは
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください